FineVT CAN-BUS 2.0 Integration for High-Value Mission Payloads
The FineVT Robotics Laboratory is actively collaborating with multiple CAN-BUS 2.0 hardware and system manufacturers to enhance interoperability with ROS2 (Robot Operating System 2).
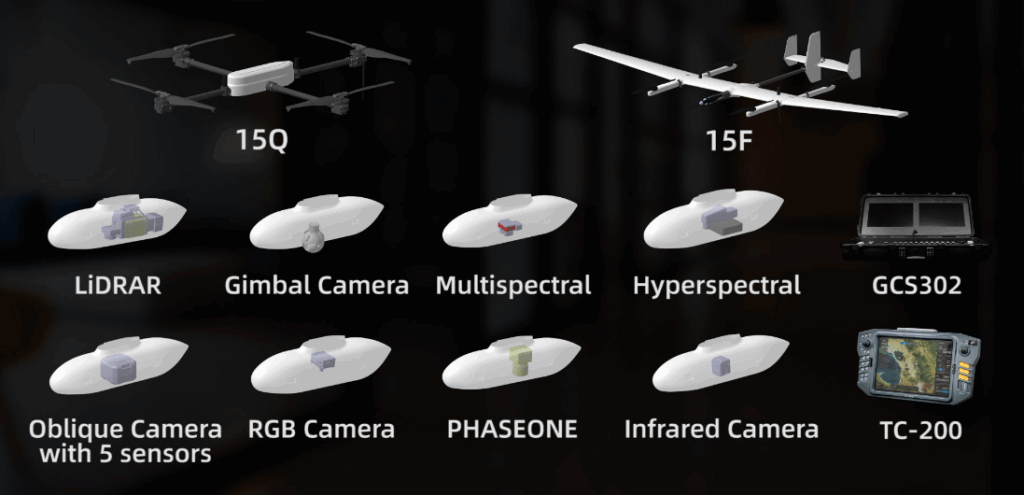
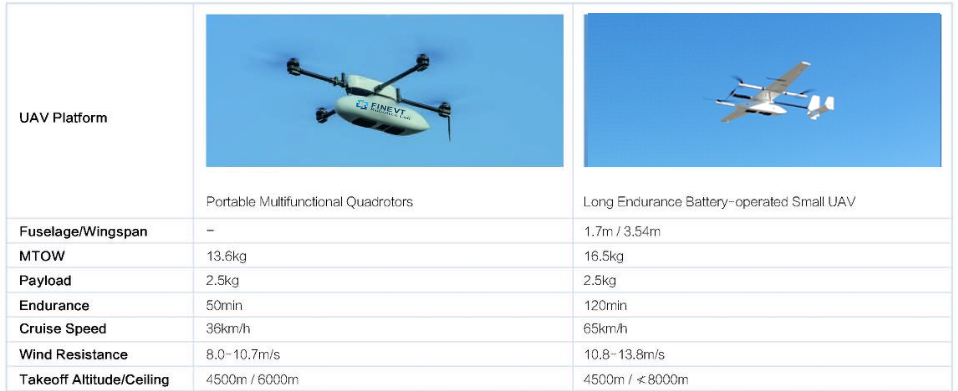
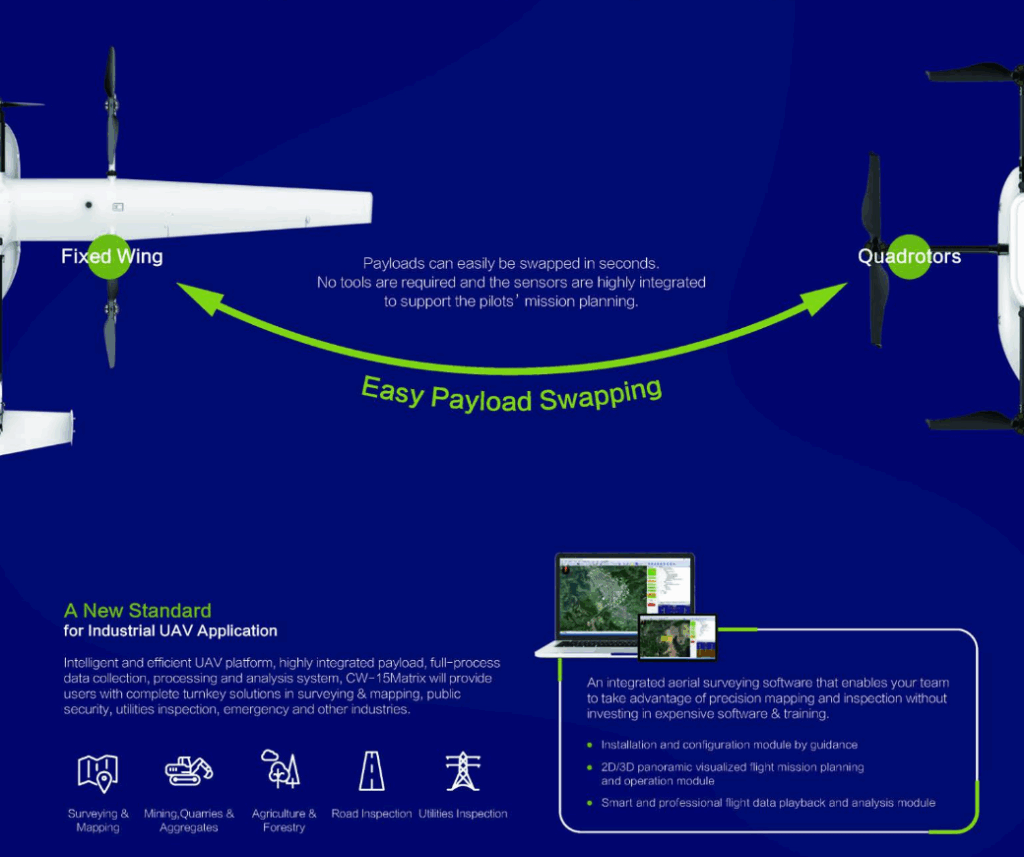
Through the development of the proprietary FineVT CAN-BUS 2.0 protocol, the laboratory has optimized high-value mission payloads for advanced aerial platforms, including eVTOLs and multicopter UAVs. This optimization ensures:
- Seamless Data Communication: Reliable high-speed data transmission between avionics systems and mission payloads.
- ROS2-Compatible Architecture: Fully optimized for real-time robotic frameworks and autonomous mission control.
- Scalability and Modularity: Enabling rapid integration with various UAV and eVTOL platforms without extensive system redesign.
This initiative represents a significant step toward establishing a standardized, ROS2-compatible CAN-BUS 2.0 ecosystem for next-generation aerial robotics applications.